HomeRobotic Database - Robotic platform | TERRINet


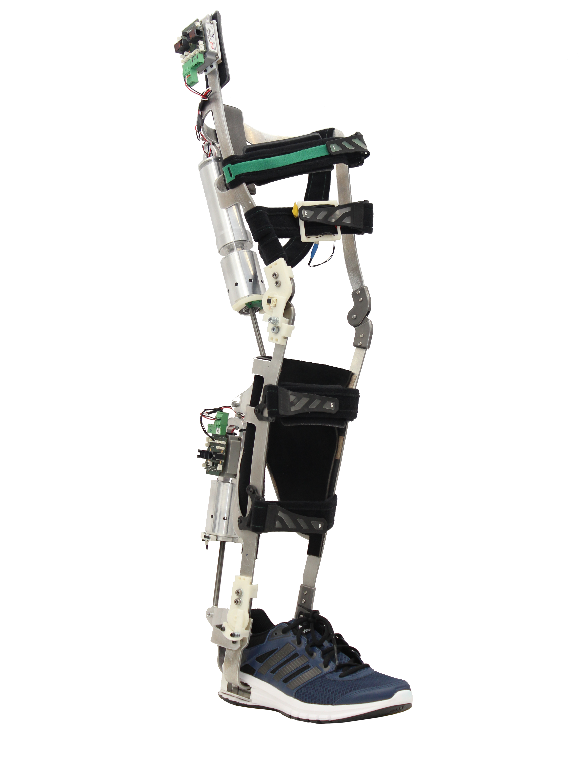
KIT-EXO-1
The exoskeleton KIT-EXO-1 was developed with the aim to augment human capabilities or to use it in rehabilitation applications. It has two active DOF at the knee and ankle joint to support flexion/extension movement. The linear actuators consist of brushless DC-motors, coupled to planetary roller screws and an optional serial spring. They are equipped with absolute and relative position encoders as well as a force sensor and can be controlled via the ArmarX software framework (https://armarx.humanoids.kit.edu). Eight additional force sensors, which are distributed on the exoskeleton measure interaction forces between user and exoskeleton at thigh, shank and foot and can be used for research on intuitive exoskeleton control or to assess the kinematic compatibility of new joint mechanisms.
Key features:
- Lower limb exoskeleton with 2 DoF
- Linear actuators with force and position sensing
- Eight force sensors measure interaction forces between human and exoskeleton
- Position, velocity, current and force control on joint level
- CANopen and RS-232 (over USB) communication
Possible applications:
- Exoskeleton control based on actuator and interaction forces
- Assessment of the kinematic compatibility of new joint mechanisms
- Motion classification or prediction with a multi-modal sensor setup
- Tests of new joint mechanisms for knee and ankle joint
Technical specifications
| OS: | Ubuntu Linux 16.04 |
| Interface: | CANopen / RS232 / USB |
| Power supply: | 48V, 10A peak |
| Total Weight: | 4 kg |
| Actuator force: | 3000 N |
| DoA: | 2 |
| Actuator speed: | 100 mm/s |
| Software: | ArmarX |
Access information
| Corresponding infrastructure | Karlsruhe Institute of Technology Institute of Anthropomatics and Robotics - High Performance Humanoid Technologies Lab (IAR H2T) |
| Location | Adenauerring 2, |
| Unit of access | Working day |
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR