HomeRobotic Database - Robotic platform | TERRINet


The Karlsruhe Humanoid Head
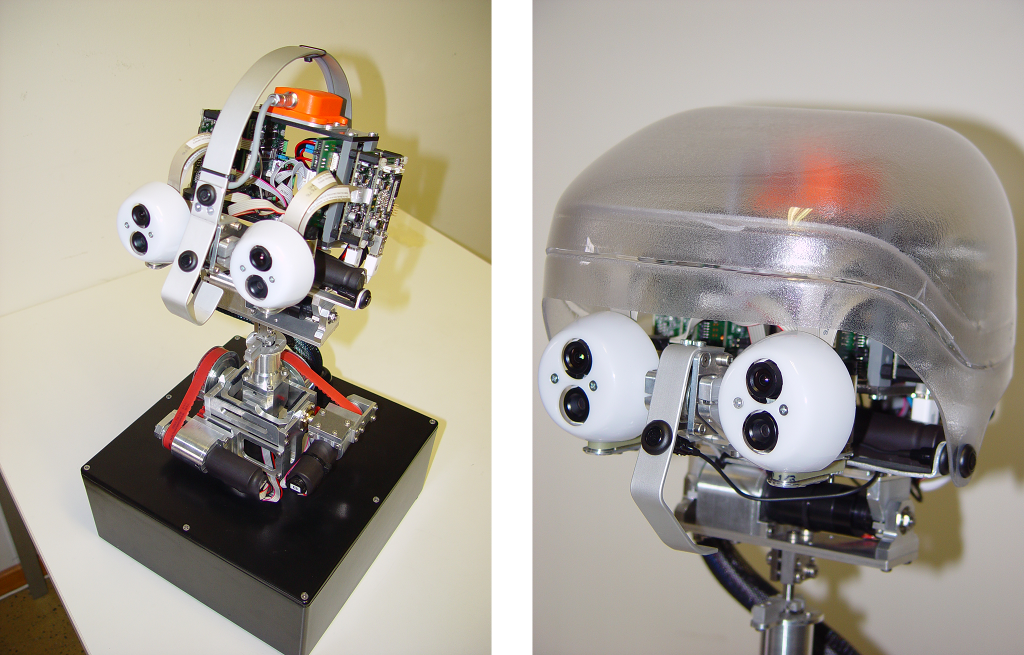
The Karlsruhe humanoid head was consistently used in ARMAR-IIIa and ARMAR-IIIb. It is a stand-alone robot head for studying various visual perception tasks in the context of object recognition and human-robot interaction.The active stereo head has a total number of 7 DOFs (4 in the neck and 3 in the eyes), six microphones and a 6D inertial sensor. Each eye is equipped with two digital color cameras, one with a wide-angle lens for peripheral vision and one with a narrow-angle lens for foveal vision to allow simple visuo-motor behaviors. The software was originally written in MCA but can also be controlled via the robot development environment ArmarX (https://armarx.humanoids.kit.edu).
Key features:
- Six channel microphone system
- Seven degrees of freedom (DoF)
- Foveated stereo camera system
- Inertial system
Possible applications:
- Human-robot interaction and communication
- Active vision
- Active visual search
- Gaze stabilization
- Multimodal attention (audio, vision)
Technical specifications
| Actuator: | DC Motor and Harmonic Drives |
| Camera: | Four Point Grey Dragonfly2 color cameras (460×480@60Hz) |
| Inertial system: | Xsens MTIx gyroscope-based orientation sensor |
| Auditory system: | Six microphones (SONY ECMC115.CE7) |
| DoF: | 7 |
| Software: | MCA or ArmarX |
Access information
| Corresponding infrastructure | Karlsruhe Institute of Technology Institute of Anthropomatics and Robotics - High Performance Humanoid Technologies Lab (IAR H2T) |
| Location | Adenauerring 2, |
| Unit of access | Working day |
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR