HomeRobotic Database - Robotic platform | TERRINet

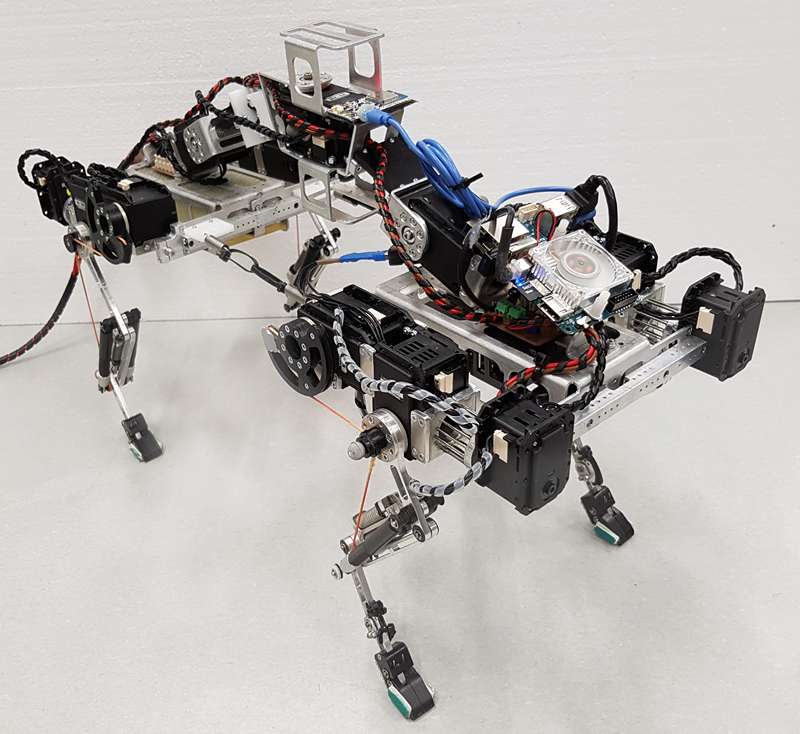
Serval
Serval, the last in a line of robot iterations, is meant to serve as a quadruped for agile movement. We use the previously researched mechanisms, control structures and gained knowledge in the electronics development to build a combined and hopefully higher performing robot. Serval consists of and active 3-DOF spine (combining advantages from Lynx and Cheetah-Cub-S), leg units with adduction/abduction mechanism and a scaled ASLP-version of Cheetah-Cub-AL. All motors (Dynamixel MX64R and MX28R) are combined with in-series elastics to protectthe rather sensitive gear-boxes from harm in different load scenarios. The robot is equipped only with a minimal sensor set, consisting of a low-cost, medium-grade IMU. Collaborations, started close to the end of this thesis will provide contact and GRF sensing with capacitive sensors as well as a sensitive skin for physical guidance. Control is realized through inverse kinematics for the legs, (for now) offsets in the spine and an underlying CPG-network for pattern generation. Reflexes, like in Oncilla, were not yet implemented, but are ongoing and future work.
Key features:
- IMU, (sensitive skin, GRF-sensors (in implementaion))
- Inverse kinematics control with in-series elastics
- Standard Servo-motors
- On-board power supply
- Possibility of up to 300g (distributed) payload
Possible applications:
- Researching loss of limb strategies
- Researching different feet or legs designs
- Exploring different neural networks inspired by animals
- Platform for sensor carrier, such as camera
- Animal gait exploration, versatility
- Exploring in narrow spaces
Technical specifications
| RC servo motor: | Dynamixel MX64R /MX28R |
| dhip-shoulder: | 0.378m |
| dshoulder-shoulder: | 0.211m |
| lhip, standing height: | 0.228m |
| Mactuators+electr, sum: | 2.167 |
| Mrobot: | 3.56 kg |
| Active degrees of freedom: | 15 |
| Gait type: | Various, main trot |
| Body lengths per second: | 2.11 |
| Froude number FR (v^2/G/lhip): | 0.27 |
| Maximum speed, vmax: | 0.8 m/s |
| Control board: | Odroid XU4 |
| Power supply, tethered, battery: | 12V (3S Lipo) |
Access information
| Corresponding infrastructure | École Polytechnique Fédérale de Lausanne BioRobotics Lab |
| Location | Route Cantonale, |
| Unit of access | Working day |
Additional information
Publication under Review, website after that
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR