HomeRobotic Database - Robotic platform | TERRINet
Warning: file_put_contents(/web/htdocs/www.terrinet.eu/home/wp-content/plugins/robotic-database-wp-plugin/print/Robotic support/performance measurement.pdf): failed to open stream: No such file or directory in /web/htdocs/www.terrinet.eu/home/wp-content/plugins/robotic-database-wp-plugin/html/shortcodes/print/create_robotic_platform_pdf.php on line 212


Robotic support/performance measurement
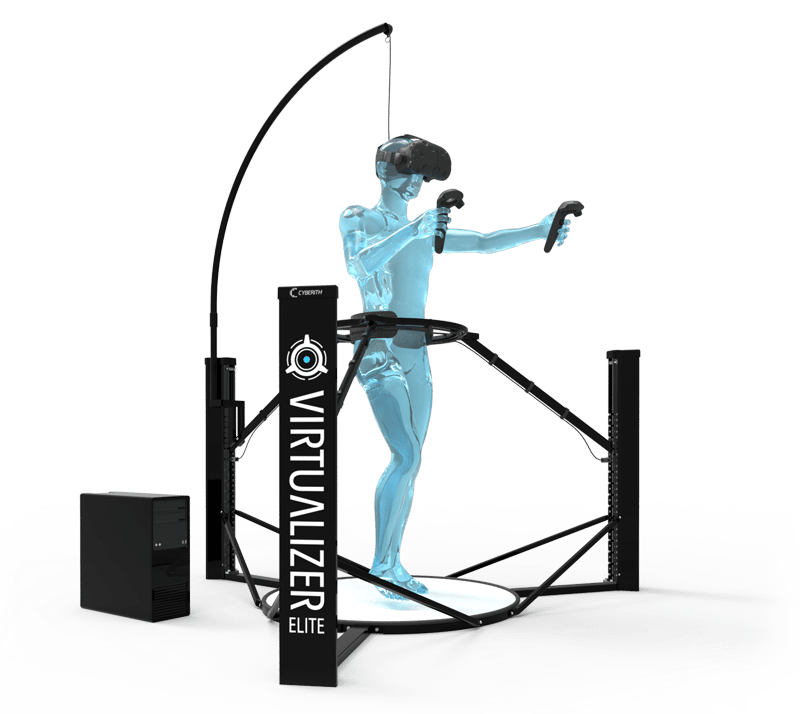
Equipment at the iCub Facility allows evaluating performance of humanoid robots by measuring accurately their movements (10-camera Vicon system) and forces (via a force platform). In addition, for legged humanoids, we have a motorized gantry system that can follow the robot motion in the testing room while keeping the robot tethered for safety (in case of failure).In addition, we have a ”virtualizer” system that together with a sensorized suit and VR system allows experiments in the field of teleoperation of humanoid robots.For walking teleoperation (or ”in place” robot testing) we also have a standard treadmill which offers the possibility of testing walking humanoids on slopes of different degrees. Treadmill
- Name: Technogym® Jog Forma
- Running deck: 86 x 210 [cm]
- Min Speed: 0.4 [Kmh]
- Max Speed: 18 [Kmh]
- Slope Selection: 0-15%
- Computer API: No
- Name: Cyberith Virtualizer
- Running deck: diam. 100 [cm]
- Speed and direction sensors: 6 light sensors arranged on a circle
- Spin angle: 360 [deg]
- Heave stroke: 58 to 144 [cm]
- Computer API: C# / C++
- Manufacturer: Rexroth
- DoF: 2
- Workspace: ca 450 x 500 [cm]
- Name: Einhell BT EH 250
- Voltage: 220-230 [V]
- Power: 500 [W]
- Max payload: 125 [Kg]
- Max speed: 8 [m/min]
- Name: Vicon
- Workspace: ca 300 x 200 x 200 [cm]
- 6 Optical cameras Bonita B10: 250 fps with one megapixel of resolution
- 1 video camera Bonita 720c: HD at 120 fps
- Computer API: C++ SDK
- Name: Arjohuntleigh Maxi Lite
- Max payload: 160 [Kg]
- Lifting stroke: 135 [cm]
Key features:
- Vicon Motion capture system
- Rexroth Crane/gantry (Cartesian robot)
- Omnidirectional treadmill Cyberith Virtualizer
- Treadmill Technogym® Jog Forma
- Floor lift/force platform
- Electric hoist
Possible applications:
- Human-Robot Interaction
- Walking performance
- Accurate measurement of robot performance (humanoids especially)
- Artificial Intelligence
- Teleoperation control
Technical specifications
| No technical specifications specified. |
Access information
| Corresponding infrastructure | Instituto Italiano di Tecnologia iCub Facility |
| Location | Via Morego, 30, |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR