HomeRobotic Database - Robotic platform | TERRINet


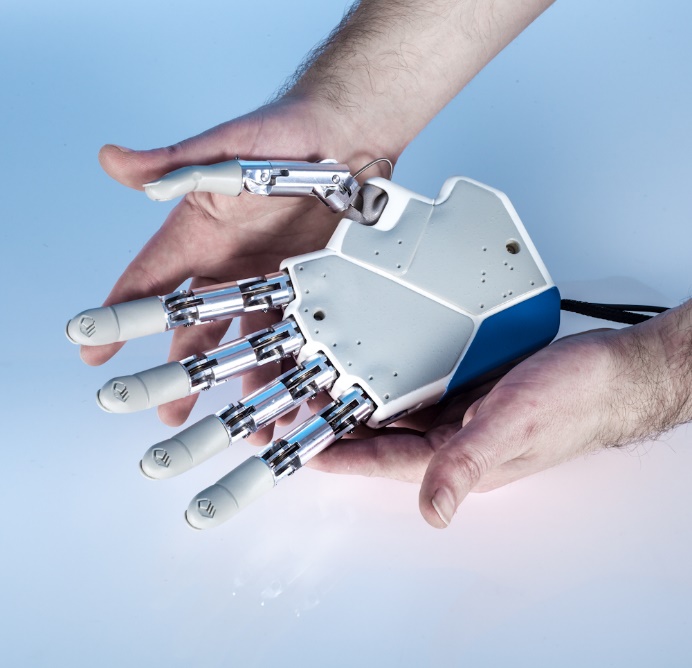
IH2 Azzurra Hand
Intrinsic robotic hand with all functional components (5 motors, tactile sensors and control electronics) integrated in the palm and in the underactuated, self-adaptive fingers. Able to perform multiple grasps and sense objects. Simple communication interface (RS-232 over USB or Bluetooth). Standard prosthetic wrist attachments available (compatible with Ottobock QWD).The compact size of these hands allows using them in research, evaluation and clinical experience with humans in real daily living environments on human-machine interfaces (either invasive or non-invasive) and control (EMG, ENG, EEG, sensory feedback systems, etc). Not only! Due to their light weight and anthropomorphism they are suitable as robotic end-effectors on limited pay-load robotic arms.
Key features:
- Embedded force sensors
- Compliant grasp: adapts to object shape
- Light weight: 640 g only!
- RS-232 (over USB) and Bluetooth communication
- Fast (1 kHz) internal control loops: current, position, force
Possible applications:
- Human-Robot Interaction
- Artificial Intelligence
- Neuroscience and Prosthetics
- Grasping, Manipulation and Haptics
Technical specifications
| Power supply: | 9V@5A peak |
| Weight: | 640 g |
| Grip force (tendon force): | 30 N |
| Full fingers flexion speed: | ~1 s |
| Quick disconnect wrist available on request: | |
| DoA: | 5 |
| Interface: | RS232/USB |
Access information
| Corresponding infrastructure | School of Advanced Studies Sant'Anna The BioRobotics Institute |
| Location | Viale Rinaldo Piaggio, 34 |
| Unit of access | Working day |
Additional information
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR