HomeRobotic Database - Robotic platform | TERRINet

Krock-2 Amphibious Quadruped
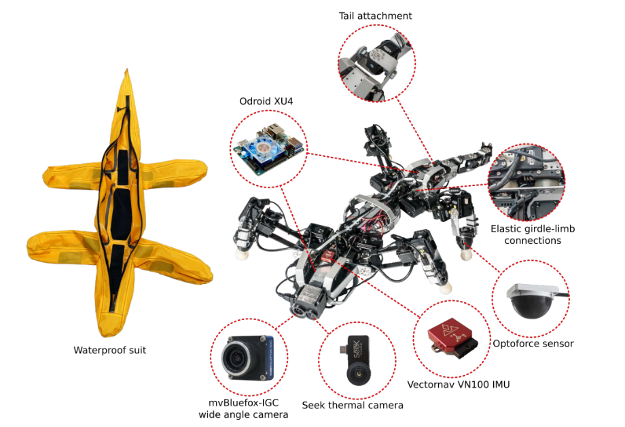
Krock 2 is a sprawling-gait quadrupedal robot developed under the NCCR Robotics grant, aimed at investigating locomotion through cluttered and wet terrain in search and rescue scenarios. The robot is capable of terrestrial locomotion as well as aquatic gaits along the surface of water when equipped with its tailored dry suit. The robot was developed by Kamilo Melo and Tomislav Horvat and is currently maintained by Matt Estrada <matthew.estrada@epfl.ch>
Key features:
- thermal and a wide-angled camera
- 21 Dynamixel motors
- two ODROID XU4 computers
- VectorNav IMU
- Waterproof suit
Possible applications:
- Search&Rescue
- Studying terrain/water locomotion
Technical specifications
| DoF: | 21 |
| Interface: | Joystick controller, ROS interface |
| Power supply: | 16V LiPo battery |
| Weight: | 4.5 kg |
| Length: | 1 m |
Access information
| Corresponding infrastructure | École Polytechnique Fédérale de Lausanne BioRobotics Lab |
| Location | Route Cantonale, |
| Unit of access | Working day |
Additional information
https://gitlab.com/biorob-krock/krock-controller
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR