Rudolf Szadkowski is a Phd Student at Czech Technical University in Prague (Prague, Czechia). He currently works on biologically inspired gait controller learning, and applied to the TERRINet project to deploy learnable phase-aware gait controller using the I-Support platform, offered by the TERRINet partner The BioRobotics Institute – SSSA (Pontedera, Italy).
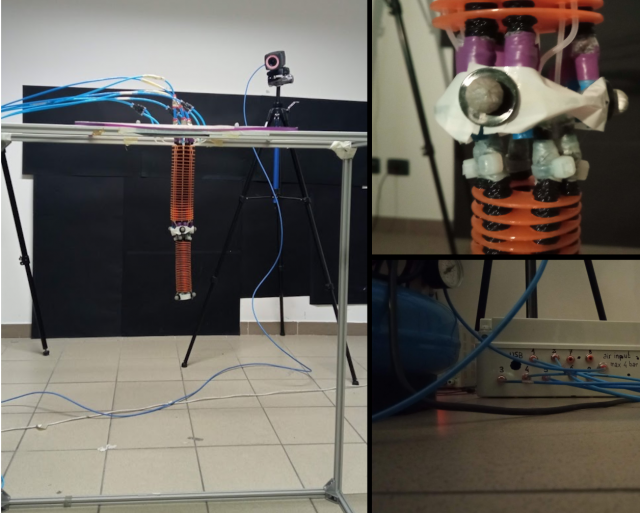
The I-Support is a soft-robotic arm composed of two connected, individually pneumatically actuated modules, see Figure 1. The pneumatically actuated soft body provides the compliance which is essential in robot-human interaction, but its dynamics are challenging to learn and control.
Learning the dynamics augmented with Central Pattern Generator
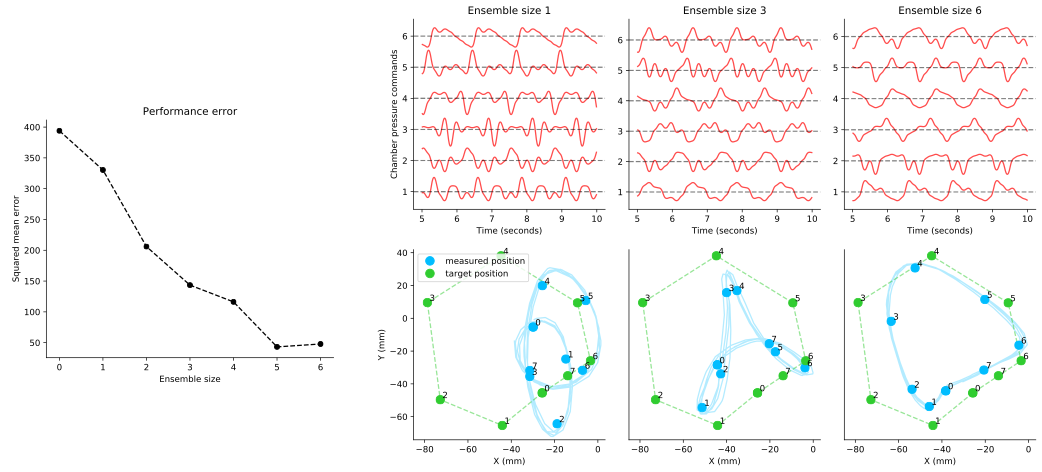
The algorithm incrementally expands an ensemble of expert models by exploring various rhythmic behaviors. The rhythm is internally represented by Central Pattern Generator (CPG), an oscillating system which provides rhythm-phase awareness [1]. As the ensemble grows the periodic behavior is tuned and approximates the desired target behavior, see Figure 2.
Ensemble of CPG augmented models synthesize novel gaits
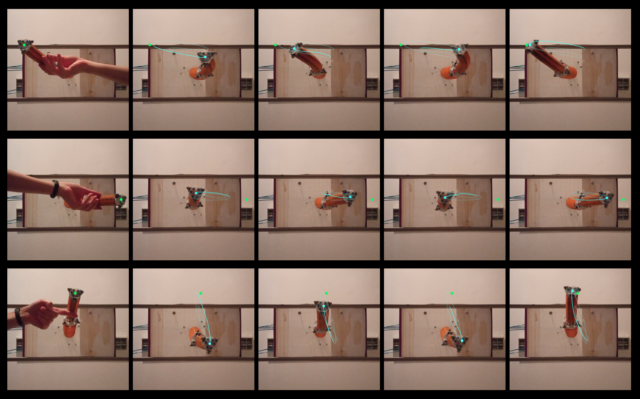
The implemented algorithm bootstraps multiple phase-aware models which estimate the interaction between commanded pressure and I-Support module positions. For given target position, the ensemble gradually tunes its behavior until the target matches with the measurement. Moreover, the ensemble can synthesize behavior for different hand-set targets without learning new models as is shown in Figure 3.
References:
[1] Yan, T., Parri, A., Ruiz Garate, V. et al. An oscillator-based smooth real-time estimate of gait phase for wearable robotics. Auton Robot 41, 759–774 (2017).

