Hocoma AG. The world leader in advanced technologies for movement rehabilitation. They’ve applied to the TERRINet project to explore new Assist-As-Needed possibilities for gait rehabilitation. A solution that could potentially improve the clinical effectiveness of their core product Hocoma Lokomat® – a medical device for gait training with neurological patients.
Jan Veneman, technical project leader and the representative of HOCOMA AG for the TERRINet project, highlighted that they were looking for a platform similar enough to Lokomat® to make the results relevant, but technically allowing a straight-forward implementation of the experimental control algorithms.
LOPES platform (Figure 1) offered by the TERRINet partner UT, RAM, with its versatile, well-functioning, and user-friendly concept, is aimed specifically for the testing of new controllers and algorithm assessments. It enabled the company to assess two different control algorithms to obtain better-established information about the possible future innovation directions, without severely adapting their platform.

“Flow-Field” and Neuromuscular CONTROLLERS: NEW APPROACHES OF GAIT REHABILITATION
Two control algorithms (controllers) were implemented – (1) “flow-field” or “velocity-field” developed by Martinez et al. (2018), and (2) neuromuscular model developed by Wu et al. (2017). Both control algorithms support a walking subject by a so-called Assist-As-Needed approach (AAN), which enables the subject to freely generate their gait pattern but provides adequate assistance when needed.
The controllers were test-walked by healthy users with the focal point to collect the motion and torque patterns and to obtain a subjective perception of the generated assistance.
(1) The “flow-field” (“velocity-field”) controller (Figure 2) works based on the velocity field and the difference between actual and reference joint velocities, instead of a fixed reference trajectory and limited stiffness. It allows the walking subject to voluntarily determine the length of each step, without being hindered when performing a longer step.

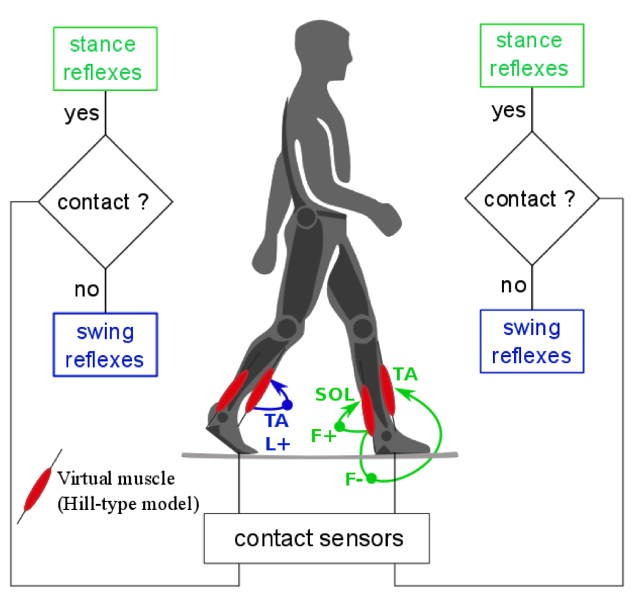
(2) The neuromuscular controller is based on the neuromuscular system of a human. The advantage of such controller is that it does not require a reference, as their control signals are directly derived from muscle activation patterns (Dzeladini et al., 2016).
THE CONTROLLERS ASSESSMENT THROUGH TEST-WALKING
For the “flow-field” controller assessment (Figure 4) the reference ellipse with the actual joint positions was plotted. The aim was to compare the position of the joint angles and the desired trajectory.
The results of the walk-test showed that the reference trajectory was not followed by the subject very accurately. After additional tests, it was visible that the issue was not related to the changed control parameters, but the swing and stance state detection within the controller. The problem appeared as too complex to proceed with the controller implementation during the TERRINet Trans-national access at UT.

The same assessment was conducted with the neuromuscular controller. The results of the test showed better performance in a persons’ movement in comparison to the “flow-field” controller and the support felt intuitive to the test-walker.
THE EXPERIMENT CONFIRMED NEW DEVELOPMENT DIRECTIONS FOR HOCOMA LOKOMAT® MEDICAL DEVICE
The experiment confirmed that both tested control approaches are feasible and intuitive to provide AAN support in gait training. Further development will be needed to make them suitable in a product context.
The successful implementation of both approaches into commercial devices could result in facilitating more extensive clinical studies into the clinical effectiveness of AAN training for gait recovery of neurological patients.
EXPLORE NEW DEVELOPMENT OPPORTUNITIES WITH TERRINet
The TERRINet project enabled HACOMA AG a hands-on experience with the evaluation of the controller ideas without time-consuming and costly design adaptations of their platform. The insights obtained by the experiment gave the company valuable information for future innovation directions.
Jan Veneman and Bente Bloks (co-worker on the experiment) recommend applying to fully covered Trans-National access to all companies that would like to explore new development opportunities on the most advanced robotic platforms in Europe, without prior investments into necessary equipment.

Does your company plan to incorporate new concepts in robotics equipment development? TERRINet offers the know-how of leading robotics experts and an environment to conduct tests on the most advanced robotic platforms in Europe.
The TERRINet Open Call no. 5 is already open (deadline: September 30, 2020). Apply here.
Click for more opportunities that we offer to the industrial users.
REFERENCES:
- Martinez, A., Lawson, B., Durrough, C., & Goldfarb, M. (2018). A Velocity-Field-Based Controller for Assisting Leg Movement During Walking with a Bilateral Hip and Knee Lower Limb Exoskeleton. IEEE Transactions on Robotics.
- Wu, A. R., Dzeladini, F., Brug, T. J., Tamburella, F., Tagliamonte, N. L., Van Asseldonk, E. H., … & Ijspeert, A. J. (2017). An adaptive neuromuscular controller for assistive lower-limb exoskeletons: A preliminary study on subjects with spinal cord injury. Frontiers in neurorobotics, 11, 30.
- Dzeladini, F., Wu, A., Renjewski, D., Arami, A., Burdet, E., van Asseldonk, E., Kooij, H., & Ijspeert, A. J. (2016). Effects of a Neuromuscular Controller on a Powered Ankle Exoskeleton During Human Walking. 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob).


